






商品别名 |
教学实训系统,CAN-BUS车载网络,汽车CAN-BUS,教学实训台架 |
面向地区 |
汽车CAN-BUS车载网络教学实训台架_系统简介:下方带视频介绍
本教学实训系统平台(以下简称教学台)采用大众轿车(宝来BORA、帕萨特PASSAT、奥迪等可选车型)车身舒适系统CAN总线网络,可演示各系统这间的关联以及系统中各模块这间通过CAN数据通信线的工作过程;可以设置模块间的CAN线故障以及各模块的K线故障;通过面板上的实物演示以及检测端子可以进行功能测试与故障分析提供参考的数据。

汽车车载网络CAN-BUS教学实训系统
汽车CAN-BUS车载网络教学实训系统_功能特点:
1、面板上绘有完整的大众车载网络(CAN-BUS)(包含舒适系统)系统原理图。设有检测端子,可通过仪器仪表检测传感器,执行器等各种信号参数如电压、电阻、频率等;
2、通过操纵控制开关,可以实现对不同车窗电机以及后视镜的控制,真实演示大众车载网络(CAN-BUS)系统的工作过程;
3、发光二极管显示工作元器件状态;
4、故障模拟系统可模拟实际运行工况,设置多种实车常见故障。具体内容详见故障模拟设置装置说明;
5、防盗与中央控制系统等操作原理;
6、装有诊断座,可读取故障码与数据流等;
7、配备PC-CAN数据交换软件及接口电缆,可以在计算机上读取CAN数据,观察CAN数据交换。在线检测CAN总线上各节点的ID,检测状态帧、控制帧等重要数据;控制数据发送,进行人为控制。通过人机交流,进行在线即时控制“实验台”上CAN节点按指令工作;
8、CAN-BUS物理信号波形与故障诊断分析;
9、底架部分采用实验桌,台面保留750px宽空间,方便放置检测用的仪器及仪表/实验报告等,表面采用烤漆工艺,带自锁脚轮;
10、汽车油漆高温烤漆处理;加装交流电源漏电保护装置;转动元器件外加装防护装置。
汽车CAN-BUS车载网络教学实训系统_技术参数:
外形尺寸: | 1440mm×550mm×1850mm(长×宽×高) |
电源: | 220V交流电压 |
工作电压: | 12V直流电压 |
工作温度: | -50℃~50℃ |
汽车CAN-BUS车载网络教学实训系统_系统配置:
(一)示教台。
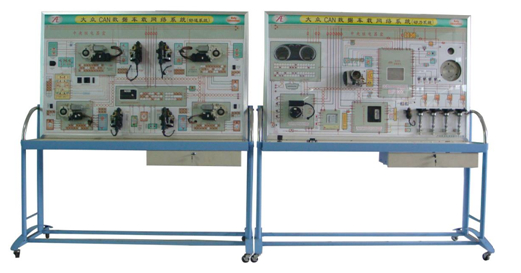
本示教台采用大众帕萨特B5轿车CANS系统。配以大型彩色喷绘CANS系统电路图,并以CANS电控单元为中心,将系统各个元器件平面布置,为使线束清晰明了连线表示方法与原车线束相同,使CANS系统一目了然.充分展示汽车数据传输网络系统的组成结构和电路元件通过数据传输执行工作。通过组合仪表的网关控制连接,可把动力系统数据网络和舒适系统数据网络连接,组成完整的全车CAN网络系统。操纵档位开关,在组合仪表显示过程中体现网络传输;操纵电动车窗、后视镜、中控门锁过程中体现网络传输等。可以设置模块间的CAN线故障以及各模块的K线故障;通过面板上的实物演示以及检测端子可以进行功能测试与故障分析提供参考的数据,完整地掌握CANS系统的结构和理论知识,了解CANS系统各电控元器件的作用、原理、故障现象。
汽车CAN-BUS车载网络教学实训系统_功能特点:
1、教学面板电路原理图和文字采用高清喷绘而成,与原车线束色彩一致;并用高强度有机玻璃板和铝合金边框包裹。
2、教学面板上彩色电路原理图上设置电控系统检测端子和排除端子,检测端子可进行实时故障检测与排除,可使用万用表、示波器等仪器检测各传感器和执行器的电压及电阻值;排除端子用于诊断出有系统线路断路或接解不良时,可将面板上检测端子和排除端子进行线路连接排除系统的故障,使教学上的故障诊断及排除更加直观,操作简单快捷。
3、电控单元诊断接口,可连接或通用型解码器,对动力系统和舒适系统进行故障码读取、故障码清除、数据流分析、自适应调整、防盗匹配等操作。
4、分为二块:动力系统与舒适系统,可立工作,也可组合工作;通过组合仪表的网关控制连接,可把动力系统数据网络和舒适系统数据网络连接,组成完整的全车CAN网络系统。
5、留有30CM以上宽度的水平桌面,便于放置解码器、万用表、以及实验报告书等
6、可根据客户需要,选配故障设置方式:①拨插断路式,可做断路或短路的故障设置以及可附加线性不间断调整电阻、电压信号;②集成电路板控制式,可通过智能触摸按键面板控制,进行故障的设置和排除;③单片机智能故障控制式,可通过主机界面进行故障的设置和排除、并具有考核系统。
7、整体台架采用钢性结构焊接,表面高温喷塑处理,台架移动自如,并带有脚轮自锁装置。
8、示教板面板可以与台架折叠,方便运输及设备放置。
9、可扩展成CAN总线系统创新开发平台。
10、可配套CAN总线分析仪(瑞典Kvaser进口仪器,含CANking总线分析软件),可实时监听分析CAN总线网络通讯数据,模拟仿真ECU发送门窗、后视镜、仪表盘指示等控制报文数据。
11、可配套CAN总线开发教学实验箱,结合教学试验台,更好的了解和掌握CAN通讯节点开发,并且可以通过节点实现对汽车系统进行远程控制实验。
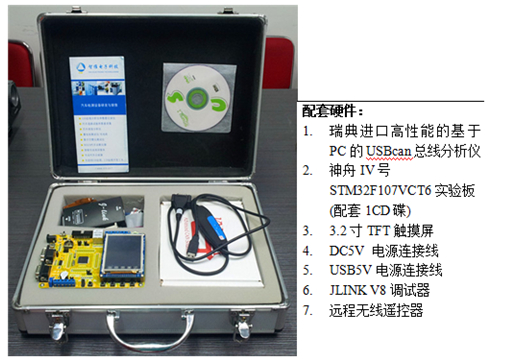
(二) CAN-BUS开发教学实训实验箱。
更多信息:
◆CANLIB 3.8帮助 (该帮助包含在CANLIB SDK中)
◆下载CANLIB SDK (包括文档,范例等等)
◆CANLIB结构一览
3、LabVIEW环境下基于CANlib用户二次开发软件
该开发指南主要介绍了关于labview开发的一些例子,能够帮助用户尽快熟悉有关labview二次开发的过程。在用户编写程序之前,要确保用户的电脑上已经正确安装了labview8.6或更新的版本,并成功对其进行注册。光盘里面的“kvCanVi”文件夹中的“kvCanStatExample”程序用于可以对总线上的数据进行收发。kvCanVI程序里面包含很多带有功能的子程序。用户可以利用这些子vi进行程序编写。(新版本的labview程序可以在www.triv.cn下载)
1、获取CAN报文ID、数据帧等信息
利用“kvCanRead.vi”或“kvCanReadWait.vi”可以获得CAN报文的ID、标志、数据。打开“kvCanStatExample”的程序框图,找到“kvCanRead”或“kvCanReadWait”子程序,该程序带有“Message Id”、“ Message Data”等接口,在其接口处右键——“创建”——“显示控件”,则可以通过显示控件来显示总线上的报文信息。
2、获取教学台上各个模块对应的ID信号
将教学台与PC机通过Kvaser总线分析仪连接起来,打开CANKing软件,在显示窗口中右键选择“Fixed Positions”,将各个ID依次排列起来。观察显示窗口,当用户在教学台上按动不同模块的按钮,会有不同ID的数据发生变化。这些ID就是该模块对应的信号。
3、利用布尔灯显示模块状态
将“kvCanRead.vi”或“kvCanReadWait.vi”的“Message Id”接口与模块的信号ID数值相比较,若相等则执行相应的的动作如“灯亮/灭”等,若不相等则直接忽略。由于在CAN总线上,同一个ID的报文并不是一直都在总线上持续发送,而是每次发送时都有一定的时间间隔。对于童锁、车门锁模块,为了能够准确反映出该模块的状态,使用“反馈节点”控件,保持模块原来的状态,直到有新的报文更新了模块的状态。
4、通过按钮控制模块动作
在程序的前面板放置一个按钮,通过事件结构,选择触发动作“值改变”,将“kvCanWrite.vi”与要发送的报文(data0~data7)连接一起之后,放置在事件结构框图里面。当点动按钮时,“kvCanWrite.vi”程序就会把用户所要发送的报文通过总线发送出去,控制对应的模块动作。
CAN-BUS 车载网络教学实训台架



